
 International
International
Multimedia


Image 1
An underwater robot developed by NTNU. This study first establishes a cylindrical dynamic model of dielectric elastomers to deeply analyze the deformation behavior of DEs under the action of electric fields and radial forces. Subsequently, taking the eel as the bionic object, tubular actuators and tubular segment drive modules for improving manufacturability are designed. These modules are connected in series and the head component, tail component and tail fin are installed, eventually creating an eel-like robot based on dielectric elastomers.
- File size: 326.8 KB
- Attribution: Chenghong Zhang, 2025, PLOS One, CC-BY 4.0 (https://creativecommons.org/licenses/by/4.0/)
- Permission category: Free to share or modify (must credit)
- Last modified: 10 Jul 2025 4:11am
- NOTE: High resolution files can only be downloaded here by registered journalists who are logged in.
Image 2
Eel imitation robot.
- File size: 391.6 KB
- Attribution: Chenghong Zhang, 2025, PLOS One, CC-BY 4.0 (https://creativecommons.org/licenses/by/4.0/)
- Permission category: Free to share or modify (must credit)
- Last modified: 10 Jul 2025 4:11am
- NOTE: High resolution files can only be downloaded here by registered journalists who are logged in.
Image 3
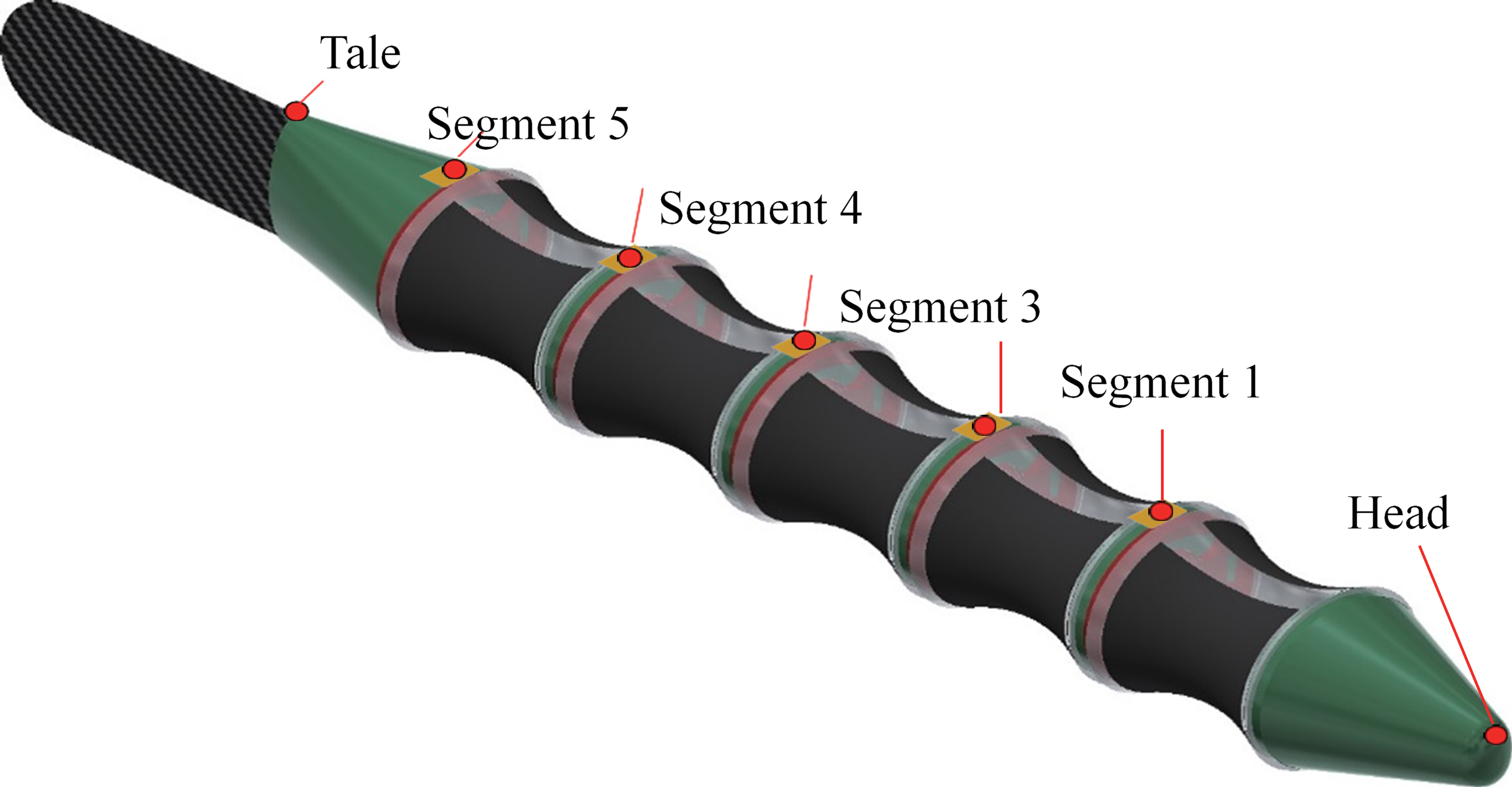
Measuring point of robot displacement.
- File size: 828.0 KB
- Attribution: Chenghong Zhang, 2025, PLOS One, CC-BY 4.0 (https://creativecommons.org/licenses/by/4.0/)
- Permission category: Free to share or modify (must credit)
- Last modified: 10 Jul 2025 4:11am
- NOTE: High resolution files can only be downloaded here by registered journalists who are logged in.
Attachments
Note: Not all attachments are visible to the general public. Research URLs will go live after the embargo ends.

Journal/
conference: PLOS One
conference: PLOS One
Research:Paper
Organisation/s:
Guiyang University, China
Funder:
This work was supported by the Joint Open Fund of Guizhou Provincial Department of Education (Grant no. [2022] 439) and the academic new seedling cultivation and free exploration and innovation of Guizhou Provincial Science and Technology Department (Grant no. [2023] 11). The funders had no role in study design, data collection and analysis, decision to publish, or preparation of the manuscript.

