
 International
International
News release
From:
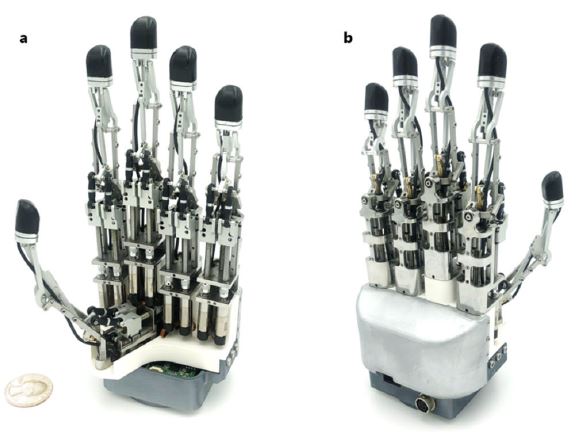
A dexterous robotic hand
A robotic hand, which integrates all of the components required for responsive movement, sensing and possesses high levels of dexterity, is presented in a paper in Nature Communications this week. The hand, which can be mounted onto existing commercial robot arms, is capable of performing a wide variety of tasks from grasping an egg to using scissors and tweezers.
Robotic hands have the potential to perform a wide variety of tasks. However, developing hands without additional actuation parts — which enable the robot to move — while maintaining functions such as high levels of dexterity or the ability to grasp with appropriate force, is challenging. Additional actuation parts also make it difficult to integrate these hands onto existing robotic arms, thus limiting their use.
Uikyum Kim and colleagues developed a dextrous robotic hand called ILDA (integrated linkage-driven dexterous anthropomorphic). The hand consists of 20 joints, which allow 15 degrees of freedom of movement, a fingertip force of 34 Newtons, weighs less than 1.1 kg, has a compact size (218mm) and tactile sensing capabilities. All of the parts are integrated into the hand, which means it can be attached to existing robotic arms without additional parts, such as forearms. In a series of experiments, the authors demonstrated that the hand was capable of picking up objects of various shapes, grasping strongly enough to crush cans, or delicately enough to hold an egg. The hand was also capable of cutting paper with scissors and picking up small objects using tweezers.
Multimedia
Attachments
Note: Not all attachments are visible to the general public. Research URLs will go live after the embargo ends.


