
 International
International
News release
From:
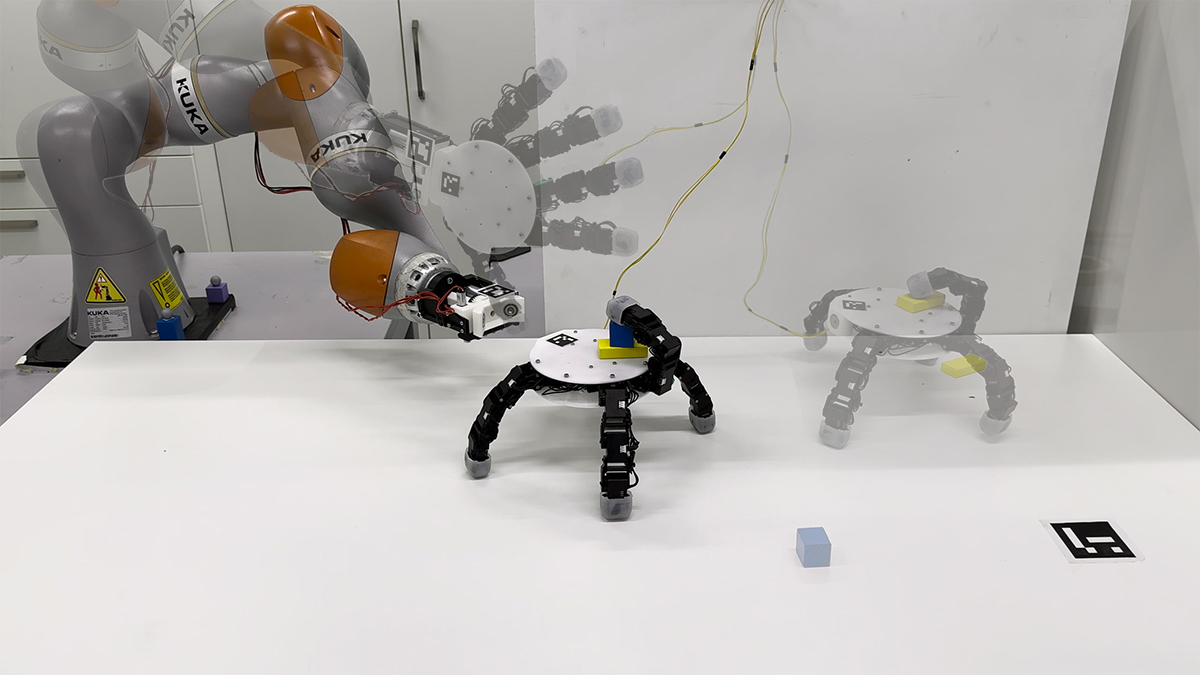
Robotics: Handy robot can crawl and pick up objects
A detachable robotic hand that can crawl and grab objects is described in Nature Communications this week. The design enables tasks such as retrieving objects beyond normal reach and performing multi-object handling, offering potential applications in industrial, service, and exploratory robotics.
Robotic hands are often designed to mimic the human hand, which is considered highly dexterous. However, their asymmetric structure — allowing grasping from one side only — and limited reach can restrict capabilities in certain tasks, such as grasping multiple objects at once or accessing confined spaces.
Xiao Gao and colleagues present two versions of a robotic hand: a five-fingered and a six-fingered design (with a palm of 16 cm in diameter), each of which has symmetrical architecture, enabling grasping from both sides. The hand can also detach from the arm-mounted base to crawl. The authors show that the hand can retrieve up to three objects sequentially and reattach while maintaining a secure grasp on the objects. The hand could securely hold several types of everyday objects, including a cardboard tube, a rubber ball, a whiteboard marker, and a tin can. It can also replicate 33 human grasp types and hold objects weighing up to 2 kilograms.
Future research may explore potential applications for this technology, such as accessing and performing tasks in confined spaces.

